
(source: Bender, et al. (2020))

transform to PED using

transform to PED using

transform to PED using

- define:
transform to PED using

- define: ,
transform to PED using

- define: , ,
transform to PED using
- define: , ,
General log-likelihood contribution:
Working Assumption :
Competing risks setting with event types

transform to PED using

estimate
Competing risks setting with event types
transform to PED using

estimate
PEM/GLM:
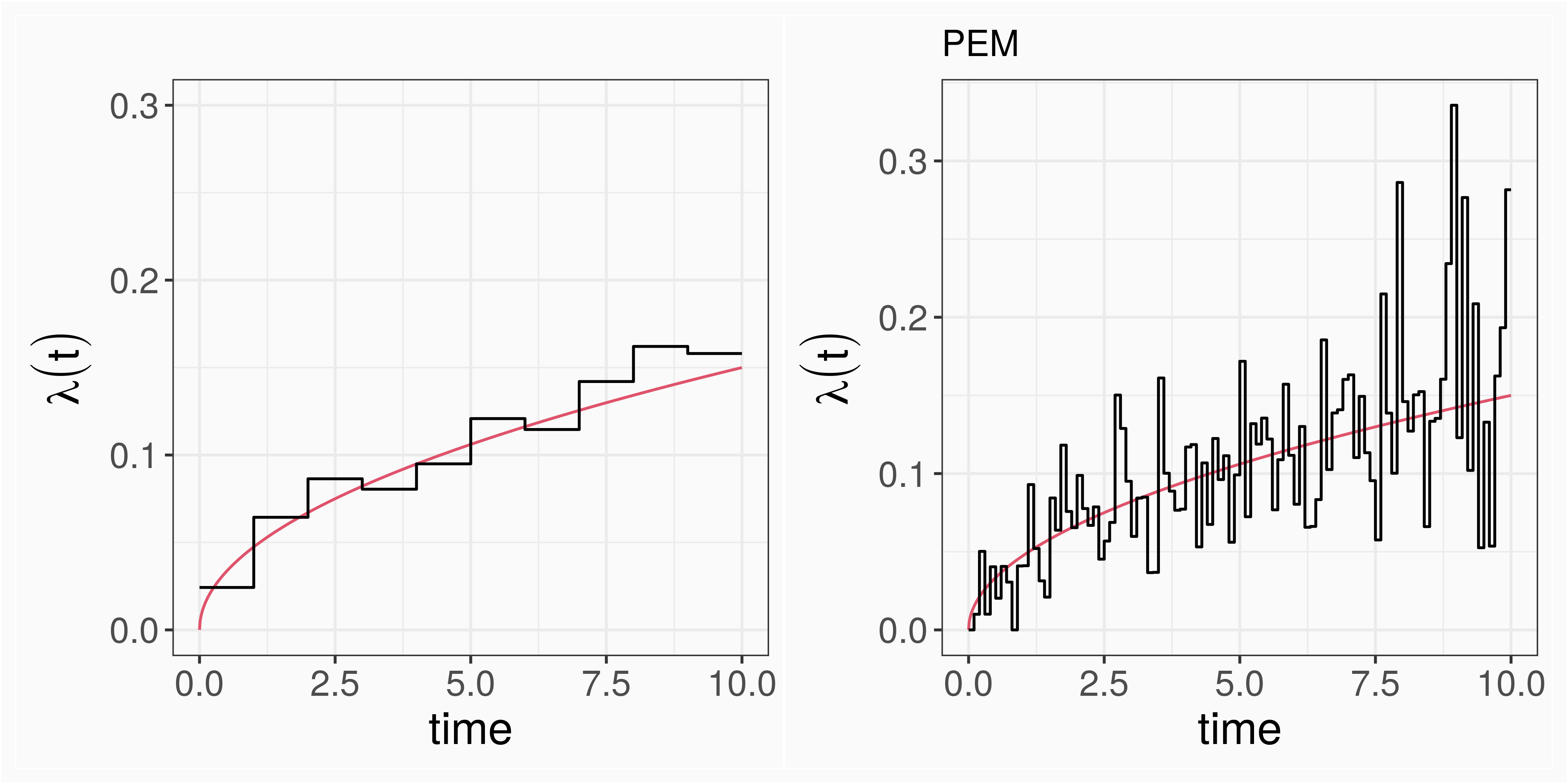
trade of w.r.t. to number of split points (less flexible/more robust vs. more flexible/less robust)
computationally inefficient (one parameter for each interval), especially when considering time-varying effects
results sensitive to number and placement of interval cut points
PAMM/GAMM:
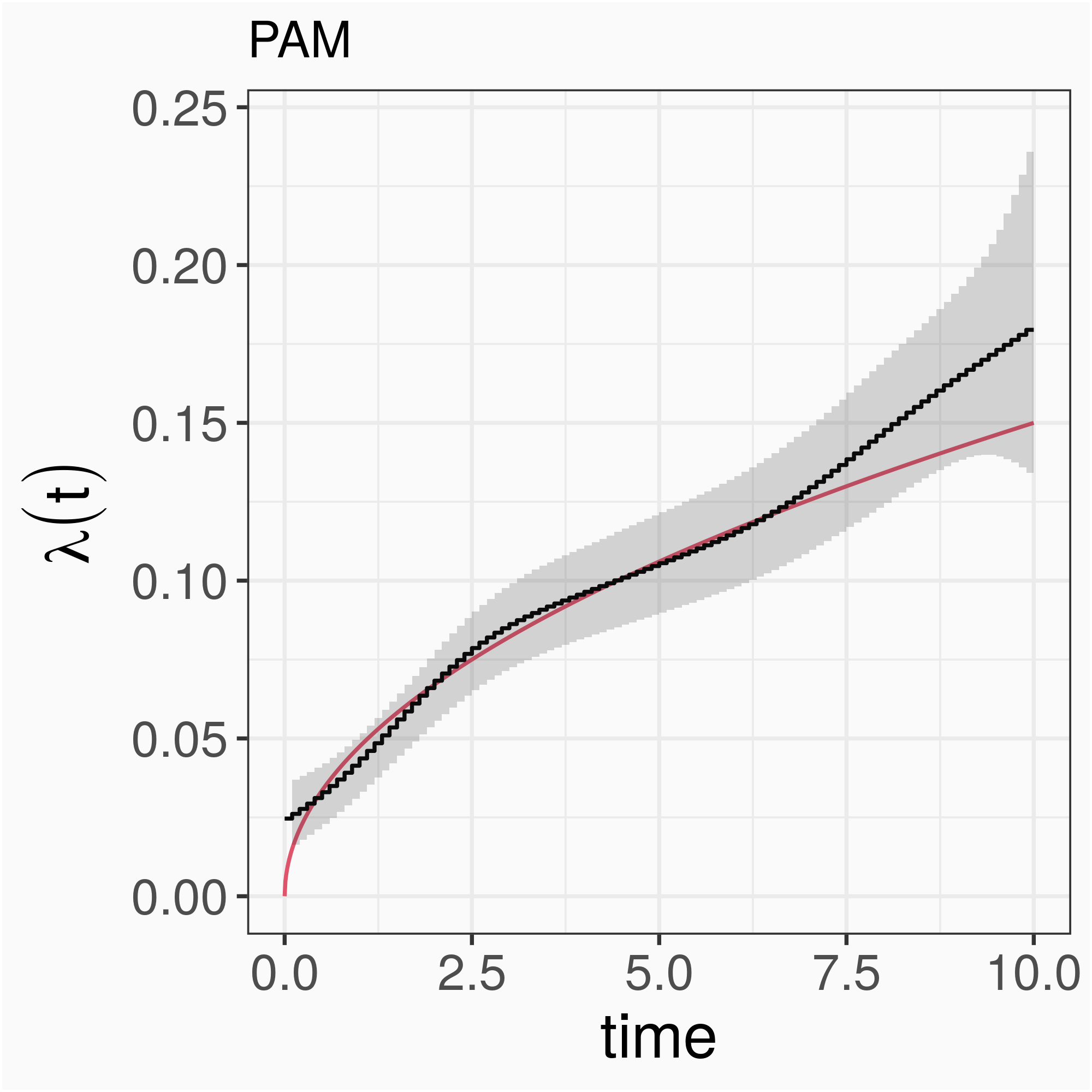
large differences between neighboring coefficients/baseline hazards of neighboring intervals are penalized
insensitive to number and placement of split points
number of parameters to estimate determined by basis dimension , not number of intervals
Time-varying effects
In the PEM/PAMM framework, time-varying effects are simply interactions of
time and other covariates.
pam_tumor <- mgcv::gam(formula=ped_status~s(tend, by=complications), data=ped_tumor, family=poisson(), offset=offset)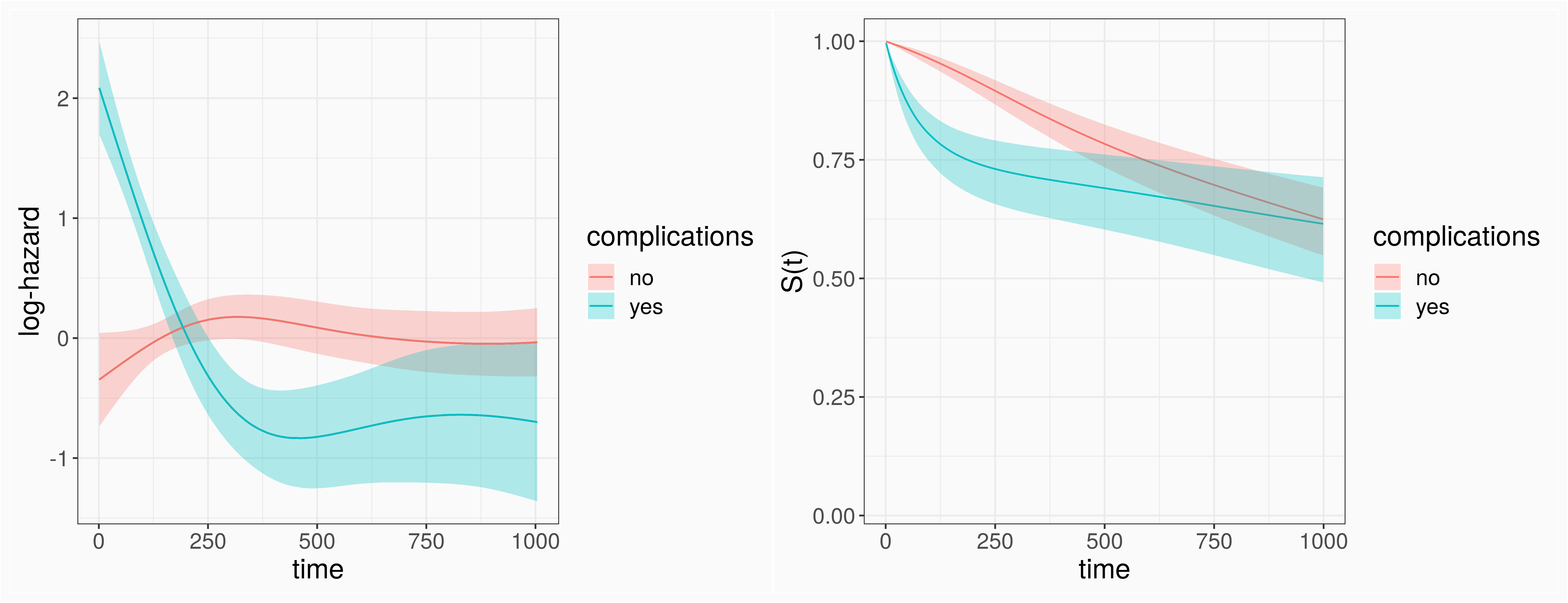
Competing Risks
Cause specific hazards are time-varying effects of time and covariate "event type"
pam_cr <- mgcv::gam(formula = ped_status ~ s(tend, by = cause), data = ped_stacked, family = poisson(), offset = offset)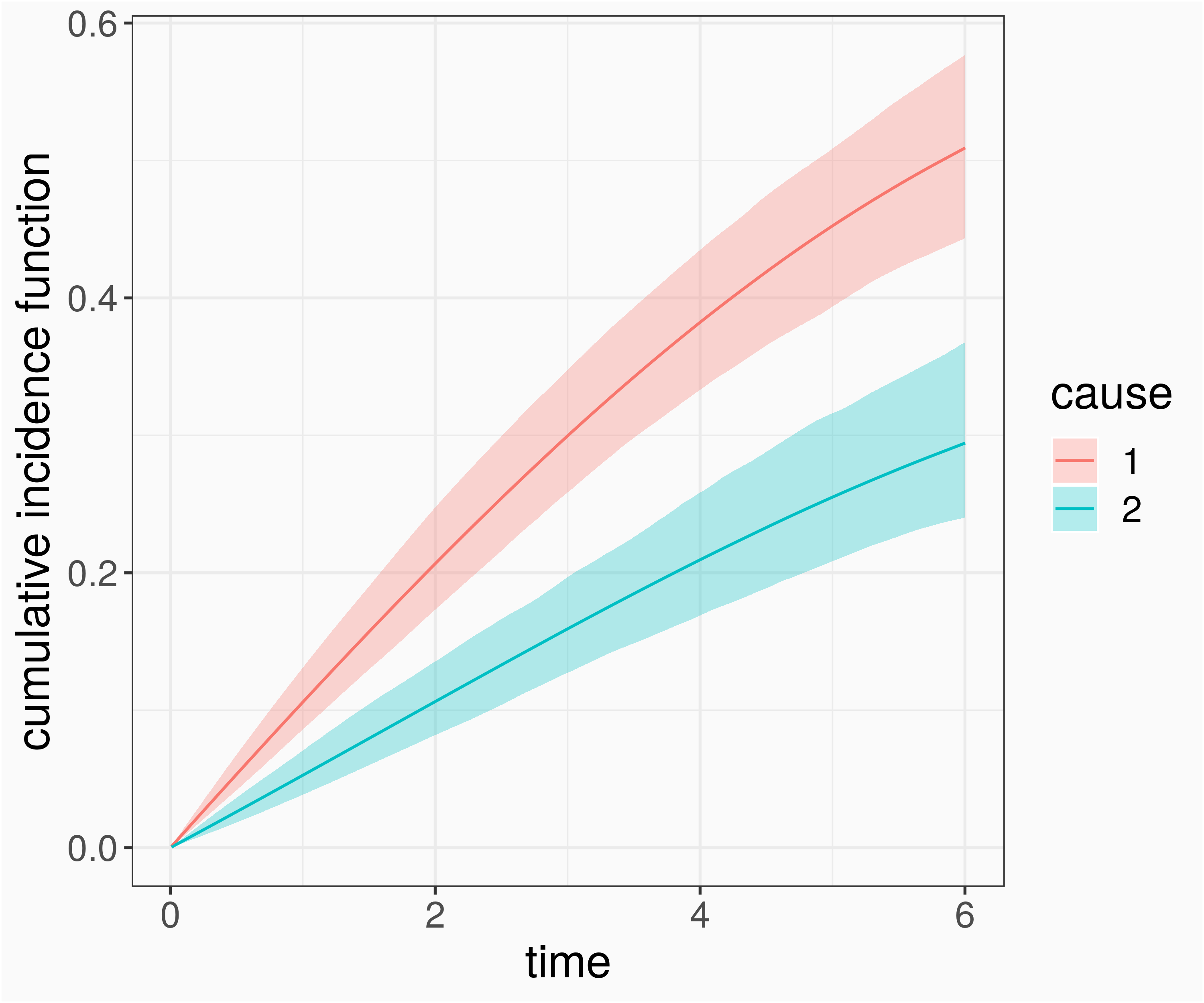
Tree based methods
Time-varying effects Shared vs. cause-specific effects (in CR)

(source: Bender, et al. (2020))